
Termékek

kartondobozos portál automata raklapozó
Rövid leírás:
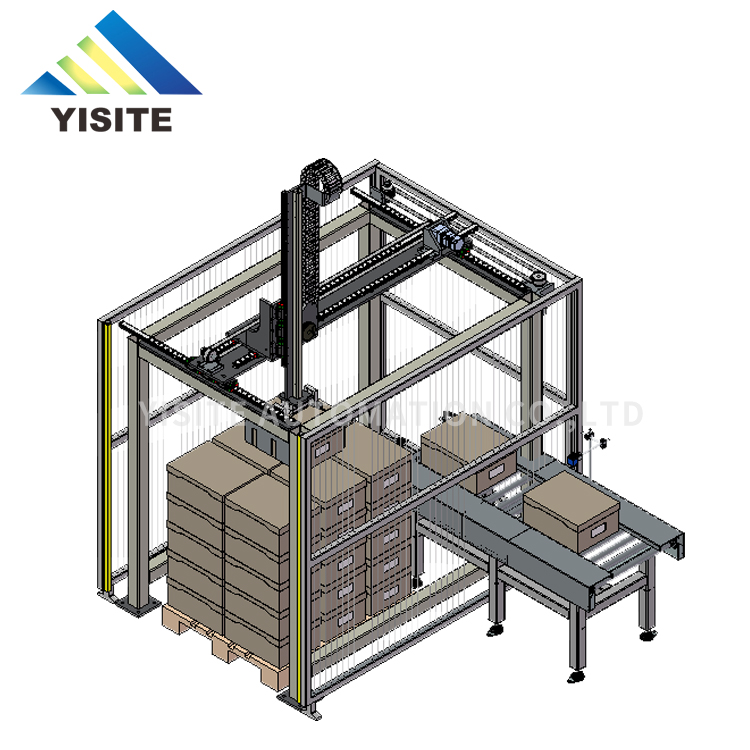
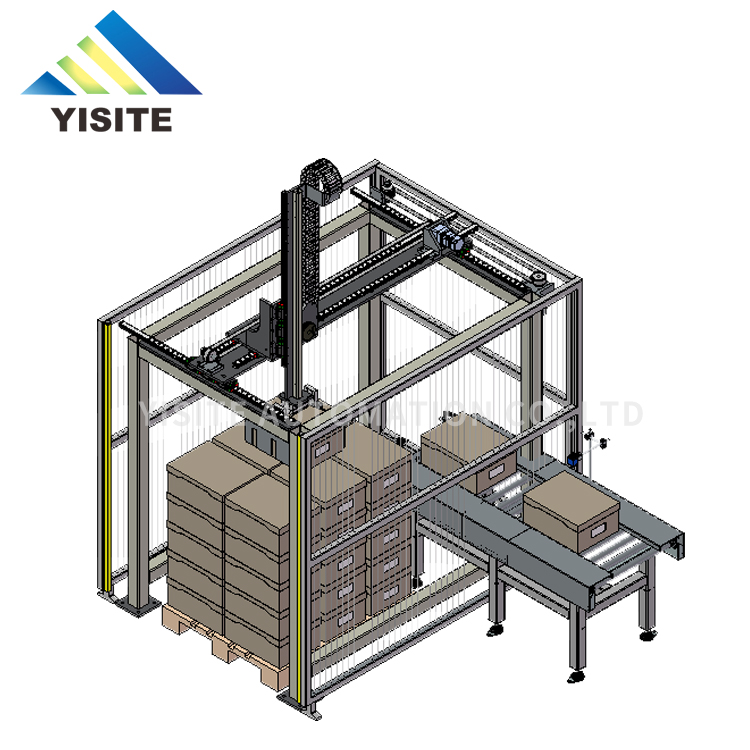
kartondobozos portálos automata palettázó termékbevezetés: A raklapozó fő egysége egy előre-hátra közlekedő kocsiból, egy keretből és egy fel-le emelhető hordozóplatformból áll. A méret és a rögzítés testreszabható.
A kartondobozos portálautomatikus raklapozó speciális kialakítású pneumatikus markolattal, állítható nyomással, nyomáspuffer szeleppel van felszerelve, így az indukciós mechanizmussal felszerelt megfogás automatikusan érzékeli a tárgyat, és tájékoztatja a vezérlőközpontot a tárgy megfogásáról.

rólunk

Professzionális személyre szabott automatizálási berendezések gyártója vagyunk. Termékeink közé tartozik a raklapozó, pick and place csomagológép, palettázó, robotintegrációs alkalmazás, be- és kirakodó manipulátorok, kartonformázó, kartonlezáró, raklap-adagoló, csomagológép és egyéb automatizálási megoldások a háttércsomagoló gyártósorhoz.
Üzemünk területe körülbelül 3500 négyzetméter. A műszaki törzscsapat átlagosan 5-10 éves mechanikus automatizálási tapasztalattal rendelkezik, ebből 2 gépésztervező mérnök. 1 programozó mérnök, 8 összeszerelő munkás, 4 értékesítés utáni hibakereső és további 10 dolgozó
Alapelvünk az "ügyfél az első, a minőség az első, a hírnév", mindig segítünk ügyfeleinknek "növelni a termelési kapacitást, csökkenteni a költségeket és javítani a minőséget" arra törekszünk, hogy a gépautomatizálási ipar vezető beszállítójává váljunk.
Truss XYZ teljesen automatikus karton bos rakodó manipulátor
1. A rakodógép összetétele
A raklapozó gép beépítési keretből, pozicionáló rendszerből, szervohajtási rendszerből, vezérlőrendszerből, elektromos vezérlő- és elosztórendszerből, biztonsági védőberendezésből stb. áll, amelyek automatikus adagoló pozicionáló rendszerrel vannak felszerelve. (Opcionális, automatikus rakásellátó rendszer)
2. Rakodógép szerelőállvány
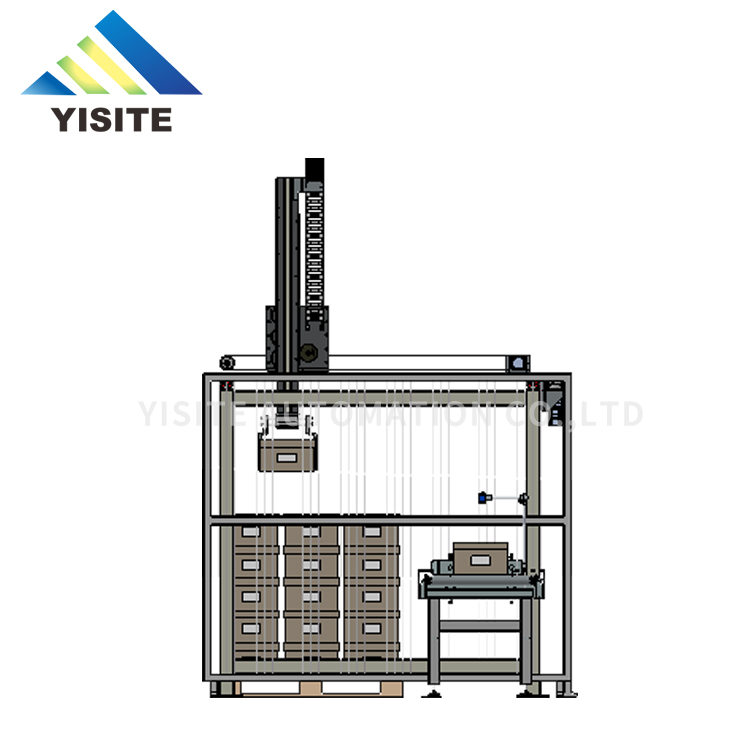
Mivel a rakodógép mozgási sebessége nagyon gyors, az indulási állapot nagy hatással van a szerelőkeretre. A beépítőkeretnek nagyon jó merevnek kell lennie, hogy biztosítsa a rakás stabil működését, ezért a hegesztett acél vázszerkezetet úgy terveztük meg, hogy a tartókeret.
3. Stacker raklapozó gép pozicionáló rendszer
A rakodó pozicionáló rendszer az egész berendezés magja, a Yaskawa Company (Japán) terméke, gyors mozgási sebesség és nagy az ismétlési pontosság, X, Y, Z három koordináta van kiválasztva a szinkron fogszíj átvitelhez, egyetlen koordináta ismétlési pozicionálási pontosság 0,1 mm, gyors vonalmozgási sebesség: 1000 mm/s. Az X tengely egyetlen pozicionáló rendszer, egyetlen 3000 mm hosszúsággal és 1935 mm fesztávval. A szinkron adó biztosítja a két pozicionáló rendszer szinkron mozgását, és egy 1500 W-os szervomotor hajtja. A forgatónyomaték és a tehetetlenség összehangolására nagy pontosságú bolygókerekes reduktor található.
Az Y-tengely kettős pozicionáló rendszerrel. A nagy keresztmetszetű pozicionáló egység oka elsősorban az, hogy az Y tengely egy kétvégű támaszték a középső felfüggesztéssel. Ha a kiválasztott keresztmetszet nem elegendő, a robot mozgásának stabilitása nem garantált, és a robot remegni fog, amikor nagy sebességgel mozog. Két pozicionáló egységet használnak egymás mellett a Z-tengely középen történő rögzítésére és egyensúlyozására. a terhelést jól. Ez a beépítési mód nagyon jó stabilitással rendelkezik. A két pozicionáló rendszert 1500 W-os szervomotor hajtja, nagy pontosságú bolygókerekes reduktorral felszerelve a hajtás nyomatékának és tehetetlenségének összehangolása érdekében.
A Z tengelyű pozicionáló rendszer szilárd és stabil. A termék általában rögzített csúszkával és általános fel-le mozgással rendelkezik. A szervomotornak gyorsan javítania kell a tárgyon, aminek le kell győznie a nagy gravitációs és gyorsulási erőt, és nagyobb teljesítményre van szüksége .A gyakorlatban egy 2000 W-os szervomotort választottunk, nagy pontosságú bolygókerekes reduktorral. Az A tengely a forgástengely.
4. Szervo hajtásrendszer
Az egymásra rakható manipulátor gép szervomotorral, digitális funkcióval. Minden motortengely fel van szerelve egy szervomotorral és egy reduktorral, négy szervomotorral és négy reduktorral, beleértve a függőleges motort zár szervo motorral.
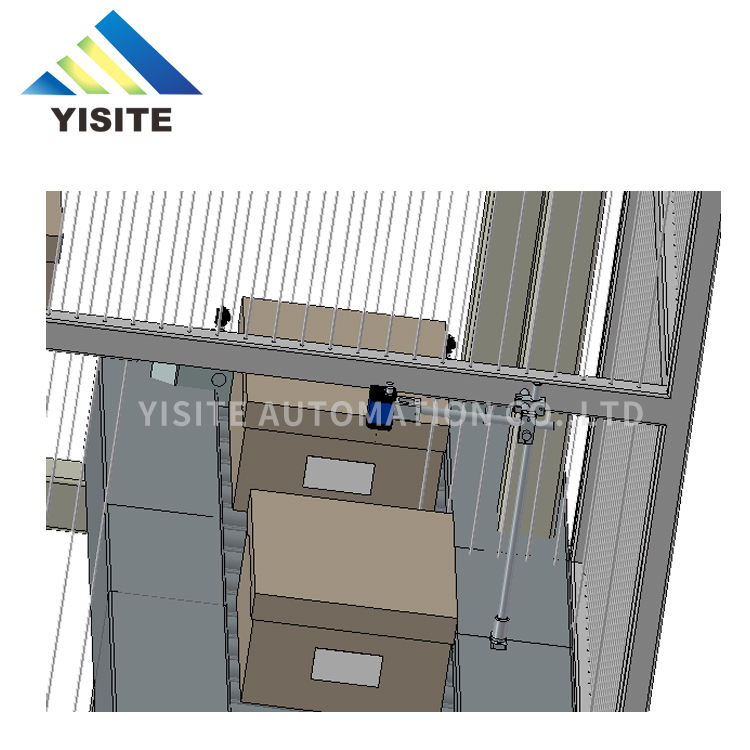
5. Targonca markolata
A halmozás speciális kialakítású pneumatikus markolattal, állítható nyomással, nyomáspuffer szeleppel felszerelve, hogy az indukciós mechanizmussal felszerelt megfogás automatikusan érzékelje a tárgyat, és tájékoztassa a vezérlőközpontot a tárgy megfogásáról.
6, vezérlőrendszer
A vezérlőrendszer egy nagy PLC-ből és egy érintőképernyőből áll. A rendszer erőteljes programozási lehetőségekkel rendelkezik. Különféle raklapozási modellekkel a rendszer előre beállíthat különféle műtermék-programokat, és a megfelelő program helyettesítésére az érintőképernyőn működtethető.
7, biztonsági berendezés
A gép hibajelző és riasztási funkcióval rendelkezik, és minden hiba pontosan tükrözi az adott helyet, könnyen és gyorsan kiküszöbölhető a hibák, elsősorban a következőket tartalmazza: robot ütközésvédelmi funkció; munkadarab beszerelés helyben érzékelése; fényvédő képernyő biztonsági védelem.
Műszaki paraméterek
1. Gépmodell: YST-MD1500
2. Rakodási kapacitás: 200-500 doboz / H
3. Keret: SS41 (A3 acél fröccsöntött műanyag kezelés) tengely S45C csapágyacél
4. Tápellátás: AC, 3 fázis, 380V, 9KW 50HZ
5. Levegőfogyasztás: 500NL / MIN (levegőhasználat: 5-6kg / cm2)
6. A felszerelés méretei: (H) 3500 mm (Sz) 2250 mm (H) 2800 mm (a tényleges elrendezéstől függ)
7. A berendezés súlya: 1500 kg


Fő előny konfiguráció
1. Yaskawa márkájú szervomotor
2. Tajvan márkájú sebességcsökkentő
3. Mitsubishi (Japán) PLC
4. A Schneiderben kontaktort és kapcsolókat kell használni
5. Omron fotoelektromos érzékelő
6. Interfész vezérlő kijelző művelet és riasztási állapot és riasztási funkció
7. Yaskawa márkájú frekvenciaváltó
8. A keret és az oldallapok szénacélból készülnek
9. Taiwan AirTac Pneumatikus elemek
10. Olasz PIAB márka Sucker









